

株式会社大林組(本社:東京都港区、代表取締役社長:蓮輪賢治)、株式会社NTTドコモ(本社:東京都千代田区、代表取締役社長:井伊基之、以下ドコモ)とエヌ・ティ・ティ・コムウェア株式会社(本社:東京都港区、代表取締役社長:黒岩真人、以下NTTコムウェア)は、屋内の建設現場でドローンを活用し、効率的に工事の進捗管理をする実証実験に成功しました。
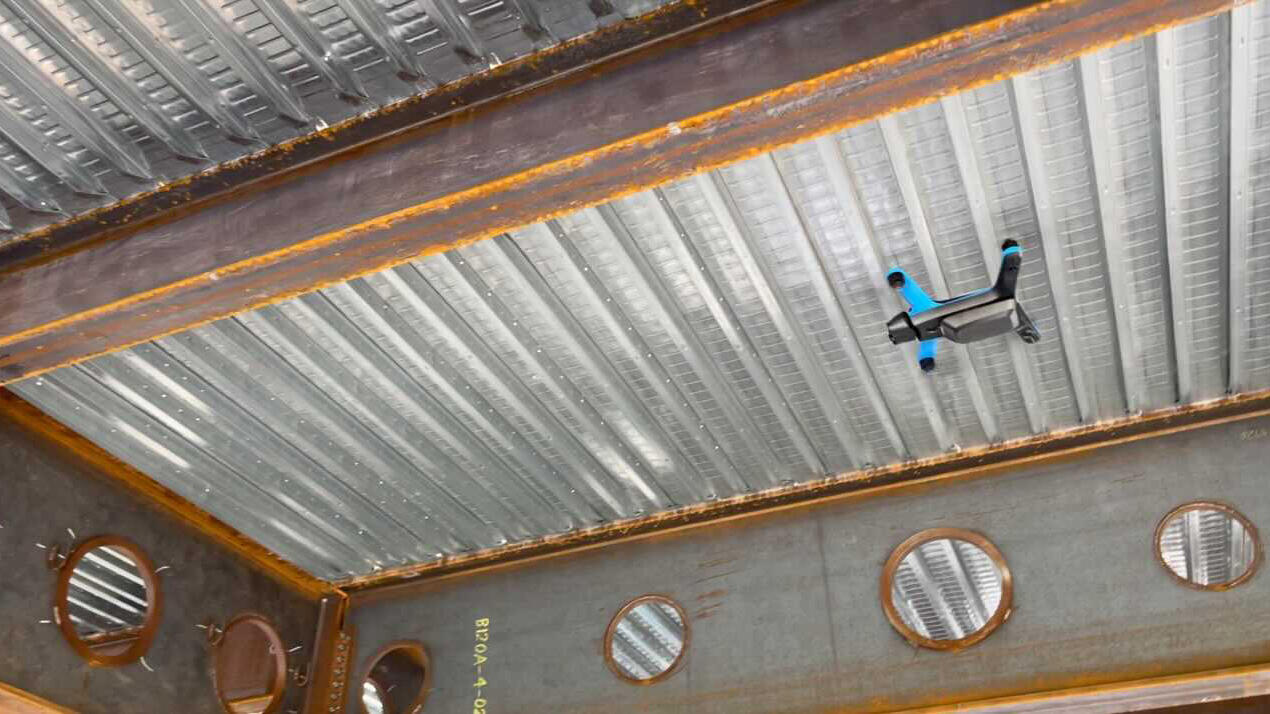
建設現場を巡回するドローン
建設業では、工事における作業工程ごとの状況写真や経過写真など、工事の記録や進捗確認のために多くの工事写真を撮影しますが、建屋内で撮影される工事写真は、位置情報の判定が困難なため、多くの場合は「階」や「工区」などの位置情報を写真管理システムに手入力しています。また、異なる日付の写真を比較する場合は、それぞれの日付のフォルダから同じ位置情報の写真を探す必要があるため、手間と時間がかかることが課題となっています。
今回3社が実証実験を実施したドローンを活用した進捗管理では、数日間隔で複数回、ドローンが建設現場の写真撮影を自動で行いました。撮影した各日の工事写真は3Dデータ上の任意の箇所をクリックするとその場所の工事写真を閲覧することができます。これにより、同じ場所で撮影された写真の時系列での比較が容易となり、人手のかかる作業が自動化できるため、現場の負担を軽減できます。
本実証実験は、Skydio社製のドローン「Skydio 2™(※1)」、ドコモが技術検証用に開発したドローン飛行プログラム、NTTコムウェアのソフトウエアである「SmartMainTech®(※2)」シリーズ「KnowledgeMap®4D(※3)」を活用し、2021年7月15日(木)~8月3日(火)に、東京都品川区にある建設現場の約500m²の屋内空間で実施しました。116ヵ所の位置を記憶したドローンが建設現場の写真を最大10日間の間隔で計3回撮影し、天候および時間帯が異なる環境において、設定されたルートを正確に自動・自律飛行できることを確認しました。
「Skydio 2」は、ドローン機体の上下に搭載された計6個のカメラで取得した映像から、周囲の三次元環境と自己位置を推定することが可能で、優れた障害物回避性能を有しています。また、小型で狭小部でも飛行可能なため、建設現場のような複雑な空間でも現場内を撮影しながら安全に飛行することができます。さらに、ドコモが「Skydio 2」向けに開発した技術検証用飛行プログラムを用いることで、多地点を通過するルートの事前設定が可能となり、GPSなどの位置情報が取得しづらい環境でも複雑なルートを自動・自律飛行することができます。
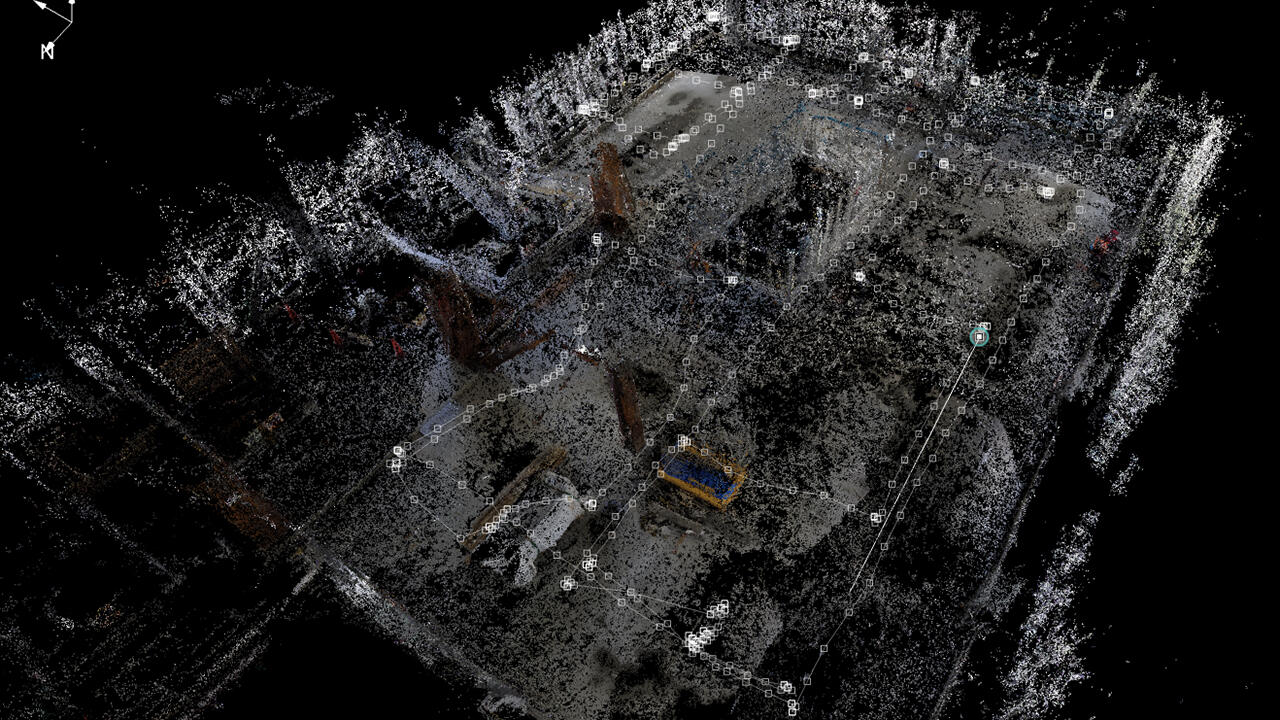
ドローンの画像から生成され、3D空間に配置された飛行軌跡と撮影点(by KnowledgeMap4D)
また、「KnowledgeMap4D」は、ドローンの飛行の軌跡および撮影点を3D空間上に配置できるため、撮影時のドローンの位置や高度などの正確な把握が可能です。ドローンが撮影した画像を3Dデータ化し、「KnowledgeMap4D」に取り込むことで、建設現場を再現した3D空間上に工事写真の撮影箇所を反映させることができます。この結果、「KnowledgeMap4D」上に表示された点群のうち任意の点を選択すると、撮影場所単位で異なる日付の工事写真を表示させることができ、時系列で容易に比較できることを確認しました。
今後3社は、ドローンを活用した建設現場におけるさらなる作業の効率化に向けて引き続き連携していきます。
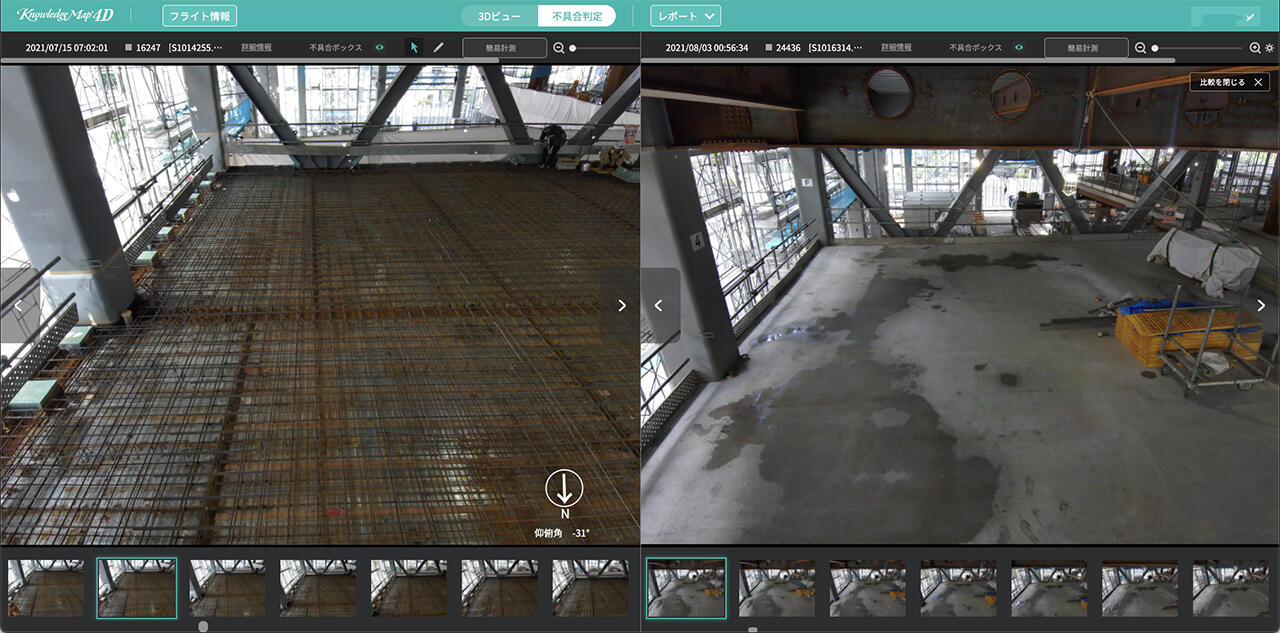
工事写真の比較 イメージ(左:7月15日、右:8月3日の同一建設現場の状況)
※1 Skydio 2
Skydio, Inc.の登録商標。AIによる自律飛行技術や障害物回避技術を搭載した同社の自律飛行型ドローン
※2 SmartMainTech
NTTコムウェアの登録商標
※3 KnowledgeMap
NTTコムウェアの登録商標。
KnowledgeMap4Dはインフラメンテナンスを支援する「SmartMainTech」のドローン点検ソフトウエア。ドローン空撮 画像を用いて構築したデジタルツイン(現実世界の再現)空間上で、遠隔拠点からの点検が可能。
参照元:PRESS CUBE